重振期(1980s)
反向传播与连接主义复兴
反向传播算法的成熟,使神经网络从单层感知机走向多层架构,开启了「连接主义」AI的新篇章。
1981反向传播 Backpropagation
保罗·韦伯斯(Paul Werbos)在博士论文中首次系统提出反向传播算法,1986年辛顿等人推广。BP解决了「如何训练多层网络」这一核心难题。
$$\frac{\partial L}{\partial w_i} = \frac{\partial L}{\partial y} \cdot \frac{\partial y}{\partial w_i}$$
数学本质:BP算法是链式法则的系统性应用。对于多层网络,损失 $L$ 对第 $l$ 层权重 $w^{(l)}$ 的偏导数为:$\frac{\partial L}{\partial w^{(l)}} = \frac{\partial L}{\partial y} \cdot \frac{\partial y}{\partial h^{(l)}} \cdot \frac{\partial h^{(l)}}{\partial w^{(l)}}$。误差从输出层逐层向输入层传播,每一层只计算"局部梯度",再与上游传来的梯度相乘。这样无论网络多深,每一层的权重都能得到明确的更新方向。
核心流程:前向传播计算输出 → 计算损失函数误差 → 反向传播梯度 → 逐层更新权重
历史意义:BP算法解决了多层神经网络的训练问题,使"深层"从不可能变为可行。它是连接主义复兴的核心引擎——没有BP,就没有1980年代的神经网络热潮,更没有后来的深度学习革命。链式法则的系统化应用至今仍是所有神经网络优化的数学基础。
1982Hopfield神经网络
约翰·霍普菲尔德(John Hopfield)提出Hopfield网络,引入能量函数概念:
$$E = -\frac{1}{2} \sum_{i,j} w_{ij} s_i s_j + \sum_i \theta_i s_i$$
网络会自发收敛到能量局部最小值,具有联想记忆能力:给定部分或受损的输入,能回忆出完整模式。为后续循环神经网络(RNN)的发展奠定了重要基础。
历史意义:Hopfield网络首次用能量函数的数学框架描述神经网络动力学,证明了网络可以作为内容寻址的联想记忆存储器。这一思想直接启发了后续的能量模型(玻尔兹曼机、RBM)和循环神经网络(RNN、LSTM)的发展。
1985–86玻尔兹曼机与RBM
杰弗里·辛顿等人提出受限玻尔兹曼机(RBM),一种双层无向图模型。通过对比散度(CD)算法进行无监督预训练,学习数据的低维特征表示。
$$E(v,h) = -\sum_i a_i v_i - \sum_j b_j h_j - \sum_{i,j} v_i w_{ij} h_j$$
其中 $v$ 为可见单元,$h$ 为隐藏单元。RBM的逐层堆叠为2006年深度信念网络(DBN)的诞生奠定了基础,是深度学习复兴的重要先驱。
历史意义:RBM是首个能有效进行无监督预训练的概率图模型,其逐层特征学习的思想为2006年深度信念网络(DBN)的诞生铺平了道路。Hinton等人用RBM堆叠实现MNIST上的突破性结果,直接引发了21世纪深度学习的复兴。
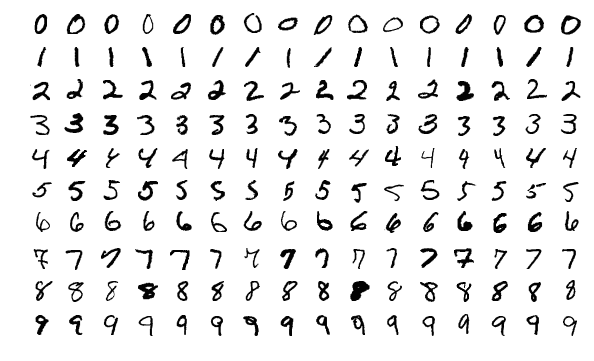
MNIST 基准数据集——深度学习的 "Hello World":由 70,000 张 28×28 像素手写数字灰度图组成(0–9 共 10 类,训练集 60,000 张、测试集 10,000 张)。它是评估图像分类算法的标准 benchmark。2006 年 Hinton 用 DBN(RBM 逐层堆叠)在 MNIST 上首次突破传统方法准确率天花板,证明了深层网络在无监督预训练 + 有监督微调范式下的强大表征学习能力。
为什么叫 "Hello World"?MNIST 数据量适中(70K 样本)、图像尺寸统一(28×28 单通道)、类别平衡(每类约 6,000 张)、任务目标明确(10 分类),且人类识别准确率已达约 98%,为算法提供了清晰的性能上限参照。这些特性使其成为所有深度学习框架(TensorFlow、PyTorch)、教材和课程的入门首选——正如 C 语言的
为什么叫 "Hello World"?MNIST 数据量适中(70K 样本)、图像尺寸统一(28×28 单通道)、类别平衡(每类约 6,000 张)、任务目标明确(10 分类),且人类识别准确率已达约 98%,为算法提供了清晰的性能上限参照。这些特性使其成为所有深度学习框架(TensorFlow、PyTorch)、教材和课程的入门首选——正如 C 语言的
printf("Hello World") 是编程的第一课,MNIST 手写数字识别是深度学习的第一课。
1986ID3决策树
昆兰(Quinlan)提出ID3决策树,开创符号主义与统计学习结合的新方向。利用信息增益选择最优分裂属性:
$$IG(S,A) = H(S) - \sum_{v \in \text{Values}(A)} \frac{|S_v|}{|S|} H(S_v)$$
数学本质:ID3的核心是信息论中的熵和条件熵。熵 $H(S) = -\sum p_i \log p_i$ 度量数据集的"混乱程度"——所有样本属于同一类时 $H(S)=0$(最纯),两类各占50%时 $H(S)=1$(最混乱)。每次分裂选择使信息增益 $IG = H(S) - \sum \frac{|S_v|}{|S|}H(S_v)$ 最大的特征,即让子节点的"平均混乱度"下降最多。这是一个贪心优化策略:每一步做局部最优选择,期望全局结果也不错。
并列概念精确定义:
熵 $H(S)$:度量数据集的不确定性。$H(S)=0$ 表示所有样本属于同一类(完全确定),$H(S)=1$ 表示两类各半(最不确定)。
条件熵 $H(S|A)$:已知特征 $A$ 的取值后,数据集 $S$ 的剩余不确定性。$H(S|A) = \sum \frac{|S_v|}{|S|}H(S_v)$。
信息增益 $IG(S,A)$:$IG = H(S) - H(S|A)$,表示用特征 $A$ 分裂后不确定性减少了多少。增益越大,说明该特征对分类越有帮助。
贪心算法:ID3在每一步选择使信息增益最大的特征进行分裂,但不保证全局最优。因为早期的一个次优选择可能导致后期无法得到最好的树结构。贪心策略的优点是计算高效($O(n \cdot m \cdot \log m)$),缺点是对数据噪声敏感、容易过拟合。
熵 $H(S)$:度量数据集的不确定性。$H(S)=0$ 表示所有样本属于同一类(完全确定),$H(S)=1$ 表示两类各半(最不确定)。
条件熵 $H(S|A)$:已知特征 $A$ 的取值后,数据集 $S$ 的剩余不确定性。$H(S|A) = \sum \frac{|S_v|}{|S|}H(S_v)$。
信息增益 $IG(S,A)$:$IG = H(S) - H(S|A)$,表示用特征 $A$ 分裂后不确定性减少了多少。增益越大,说明该特征对分类越有帮助。
贪心算法:ID3在每一步选择使信息增益最大的特征进行分裂,但不保证全局最优。因为早期的一个次优选择可能导致后期无法得到最好的树结构。贪心策略的优点是计算高效($O(n \cdot m \cdot \log m)$),缺点是对数据噪声敏感、容易过拟合。
从单棵树到森林:ID3的单个决策树虽然可解释性强,但容易过拟合且对训练数据波动敏感。随机森林(后文 2001 年)通过 Bagging 策略解决这一问题:从原始数据集中有放回地随机抽取多个子集,每个子集训练一棵决策树,最终对所有树的预测结果进行投票。随机性(样本随机 + 特征随机)让每棵树都有独特视角,集体决策显著降低方差、提升泛化能力。这一"民主投票"思想是决策树从可解释模型向高性能集成模型跃迁的关键一步。
历史意义:ID3首次将信息论的熵概念系统性地应用于机器学习,开创了"用数据自身结构指导模型构建"的范式。决策树的可解释性使其在医疗诊断、金融风控等对透明度要求高的领域至今不可替代,XGBoost和LightGBM仍是Kaggle竞赛的常胜算法。